|
I am a second-year M.S. student at the Institute of Automation, Chinese Academy of Sciences, advised by Prof. Yinghao Cai. I received my Bachelor's degree from Hunan University. My research interests lie at the intersection of computer vision, computer graphics, and robotics. I am open to research discussions and collaborations—feel free to reach out! Email / Google Scholar / Github / X |

|
|
|
|
|
* denotes equal contribution. For the full publication list, please refer to my Google Scholar . |
|
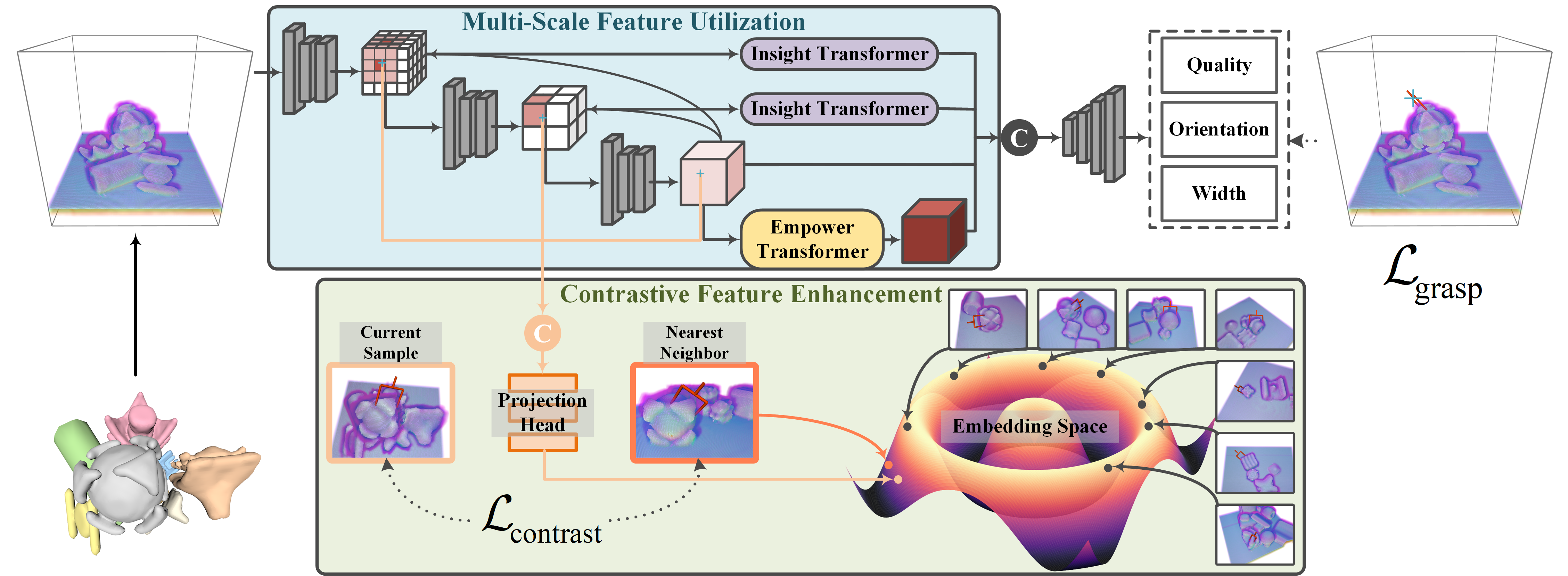
Qingyu Fan, Yinghao Cai, Chao Li, Chunting Jiao, Xudong Zheng, Tao Lu, Bing Liang, Shuo Wang IROS 2025 [arxiv] [project] |
|
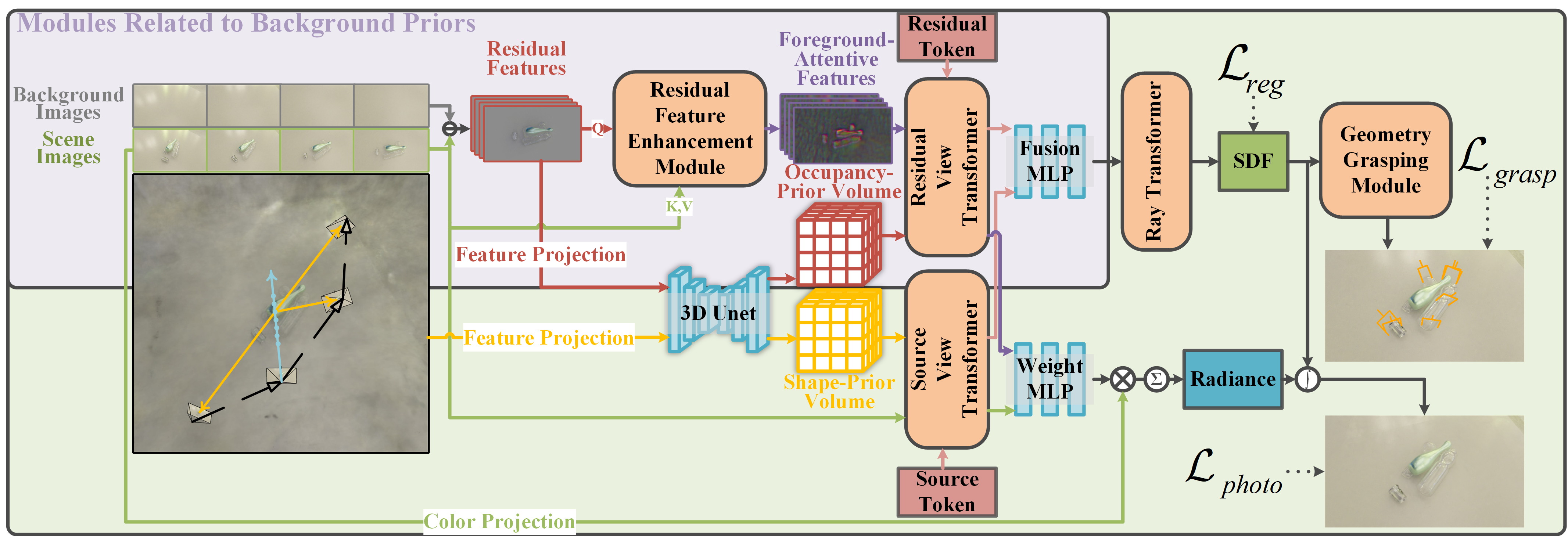
Qingyu Fan, Yinghao Cai, Chao Li, Wenzhe He, Xudong Zheng, Tao Lu, Bing Liang, Shuo Wang ICRA 2025 [arxiv] [project] |
|
|
|
M.S. in Control Science and Engineering (2023 - ) Advisor: Prof. Yinghao Cai |

|
B.E. in Automation, Minor in Robotics Engineering (2019 - 2023) Rank: 1/140 |
|
|
|
This homepage is designed based on Jon Barron's website and deployed on Github Pages. Copyright 2025 © Qingyu Fan |